Debugging nRF52840-MDK board with Visual Studio Code¶
Introduction¶
Visual Studio Code is a lightweight but powerful source code editor which runs on your desktop and is available for Windows, macOS and Linux. With the addition of the C/C++ extension to Visual Studio Code, you might have what is needed in such a small, cross-platform editor.
This post explains how to configure the local debug toolchain for debugging nRF52840-MDK board with Visual Studio Code.
Hardware Requirements¶
- nRF52840-MDK board
- 1x USB-C cable
- A Windows/macOS/Linux PC
Install Visual Studio Code¶
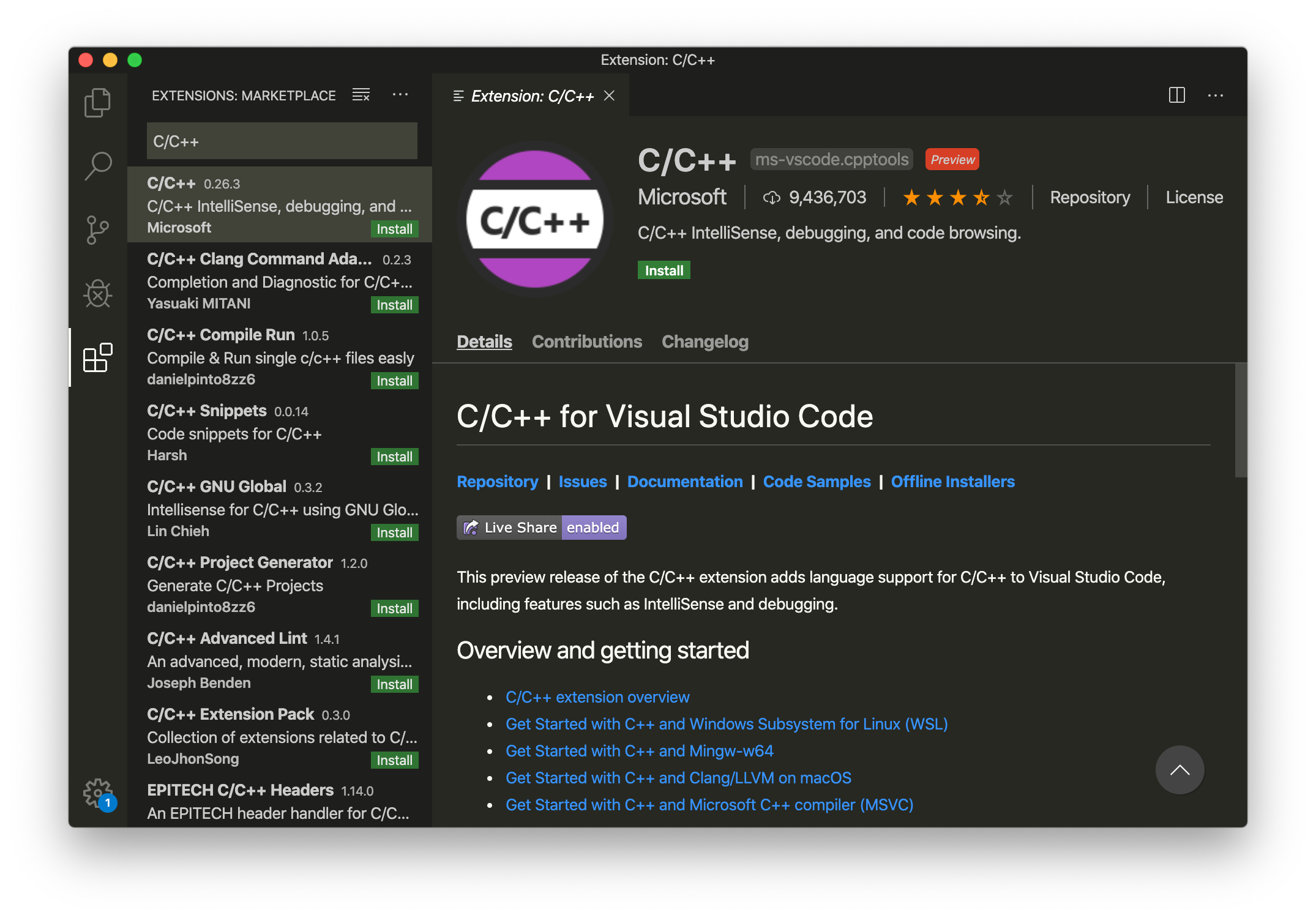
You need to install Visual Studio Code with the C/C++ extensions to begin.
- Install Visual Studio Code.
- Open Visual Studio Code, and click on the Extensions button.
- Search for the C/C++ plugin (by Microsoft) and click Install.
- When prompted, restart the IDE.
Install pyOCD¶
The latest stable version of pyOCD may be installed via pip as follows. Skip this step if pyOCD already exists.
Install GNU Arm Embedded Toolchain¶
Download and install the GNU ARM Embedded Toolchain. Then ensure the path is added to your OS PATH environment variable:
# in ~/.bash_profile, add the following script
export PATH="<path to install directory>/gcc-arm-none-eabi-6-2017-q2-update/bin:${PATH}"
Type the following in your terminal to verify if arm-none-eabi-gcc works:
Configuring the debugger¶
The launch.json file is used to configure the debugger in Visual Studio Code. To configure the debugger for your project:
-
Open the project folder in Visual Studio Code.
-
Open the
.vscode/launch.jsonfile and add the example configurations:{ "version": "0.2.0", "configurations": [ { "name": "C++ Launch", "type": "cppdbg", "request": "launch", "program": "${workspaceRoot}/armgcc/_build/nrf52840_xxaa.out", "args": [], "stopAtEntry": true, "cwd": "${workspaceRoot}", "environment": [], "externalConsole": false, "debugServerArgs": "", "serverLaunchTimeout": 20000, "filterStderr": true, "filterStdout": false, "serverStarted": "GDB\\ server\\ started", "preLaunchTask": "make", "setupCommands": [ { "text": "-target-select remote localhost:3333", "description": "connect to target", "ignoreFailures": false }, { "text": "-file-exec-and-symbols ${workspaceRoot}/armgcc/_build/nrf52840_xxaa.out", "description": "load file", "ignoreFailures": false}, { "text": "-interpreter-exec console \"monitor endian little\"", "ignoreFailures": false }, { "text": "-interpreter-exec console \"monitor reset\"", "ignoreFailures": false }, { "text": "-interpreter-exec console \"monitor halt\"", "ignoreFailures": false }, { "text": "-interpreter-exec console \"monitor arm semihosting enable\"", "ignoreFailures": false }, { "text": "-target-download", "description": "flash target", "ignoreFailures": false } ], "logging": { "moduleLoad": true, "trace": true, "engineLogging": true, "programOutput": true, "exceptions": true }, "linux": { "MIMode": "gdb", "MIDebuggerPath": "arm-none-eabi-gdb", "debugServerPath": "pyocd-gdbserver" }, "osx": { "MIMode": "gdb", "MIDebuggerPath": "arm-none-eabi-gdb", "debugServerPath": "pyocd-gdbserver" }, "windows": { "preLaunchTask": "make.exe", "MIMode": "gdb", "MIDebuggerPath": "arm-none-eabi-gdb.exe", "debugServerPath": "pyocd-gdbserver.exe", "setupCommands": [ { "text": "-environment-cd ${workspaceRoot}\\armgcc\\_build" }, { "text": "-target-select remote localhost:3333", "description": "connect to target", "ignoreFailures": false }, { "text": "-file-exec-and-symbols nrf52840_xxaa.out", "description": "load file", "ignoreFailures": false}, { "text": "-interpreter-exec console \"monitor endian little\"", "ignoreFailures": false }, { "text": "-interpreter-exec console \"monitor reset\"", "ignoreFailures": false }, { "text": "-interpreter-exec console \"monitor halt\"", "ignoreFailures": false }, { "text": "-interpreter-exec console \"monitor arm semihosting enable\"", "ignoreFailures": false }, { "text": "-target-download", "description": "flash target", "ignoreFailures": false } ] } } ] } -
Create a make task in
.vscode/tasks.jsonfile:{ // See https://go.microsoft.com/fwlink/?LinkId=733558 // for the documentation about the tasks.json format "version": "2.0.0", "tasks": [ { "label": "make", "options": { "cwd": "${workspaceRoot}/armgcc" }, "problemMatcher": { "owner": "cpp", "fileLocation": ["relative", "${workspaceRoot}"], "pattern": { "regexp": "^(.*):(\\d+):(\\d+):\\s+(warning|error):\\s+(.*)$", "file": 1, "line": 2, "column": 3, "severity": 4, "message": 5 } }, "args": [], "linux": { "command": "make" }, "osx": { "command": "make" }, "windows": { "command": "make.exe" } } ] }
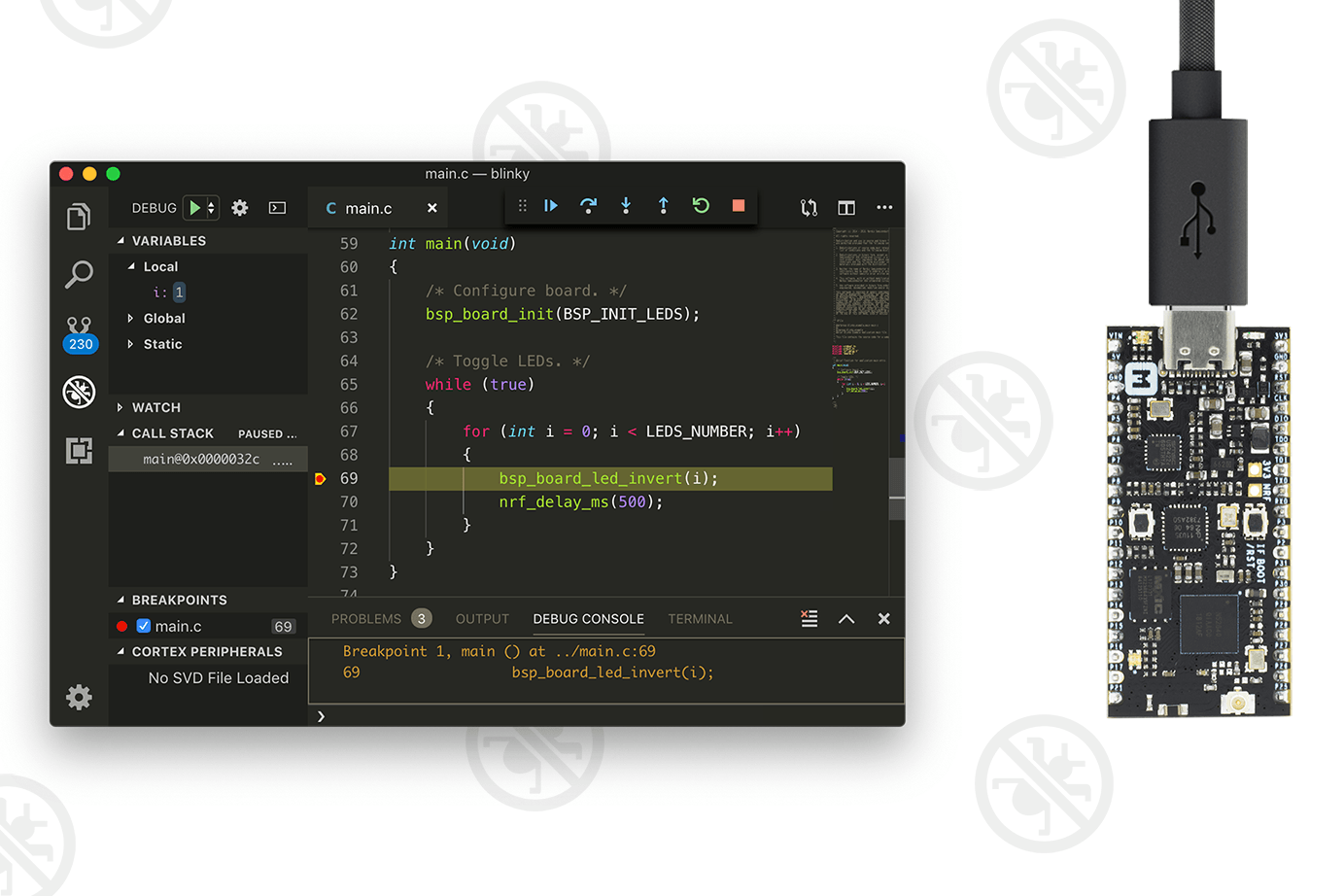
Debugging your project¶
Connect the board to your PC, click Debug -> Start Debugging , and debugging starts. Click on the Debug Console tab to see the debug output:
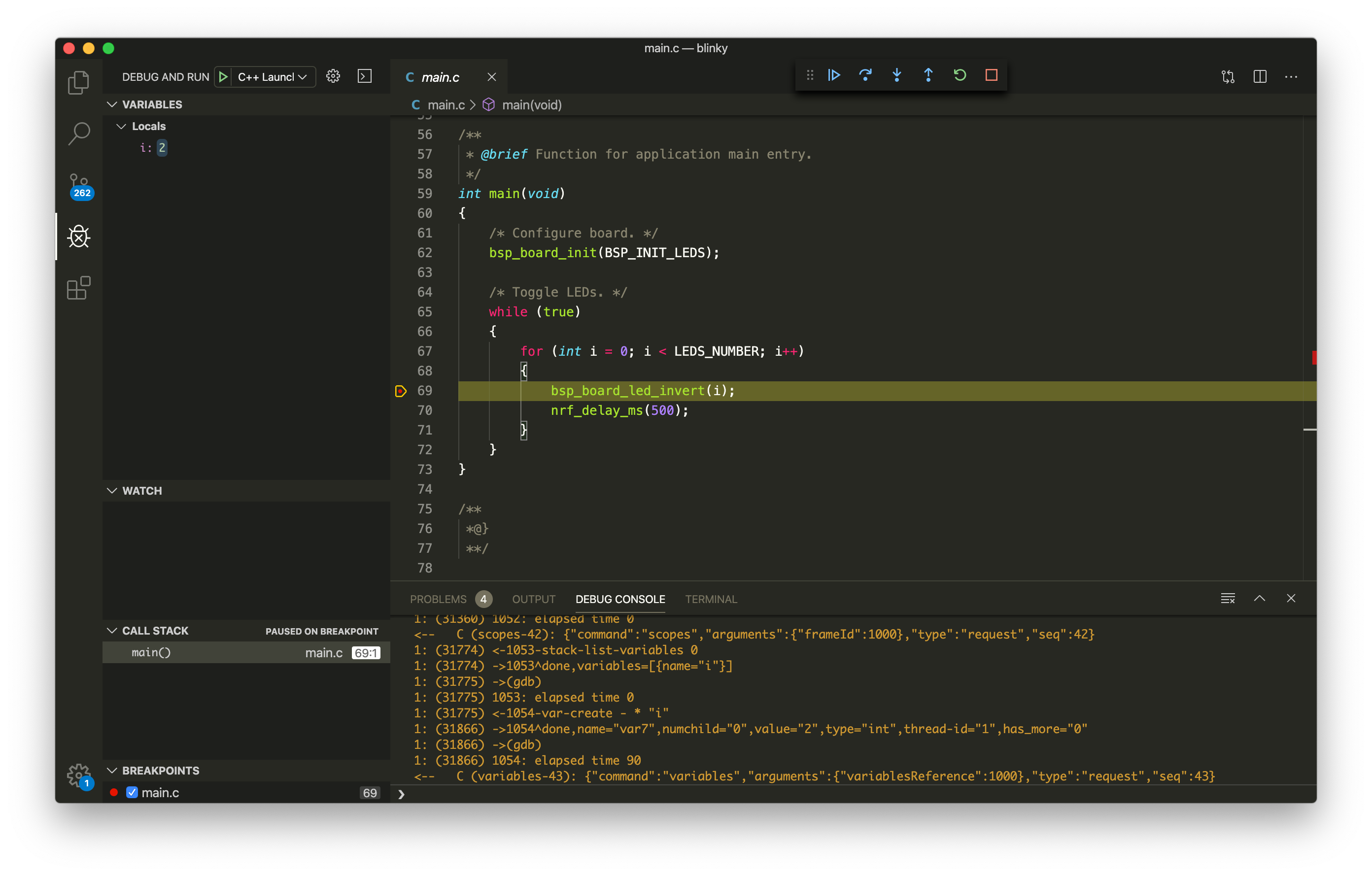
Now you can explore the debugging capabilities for Variables, Breakpoints, and more.
Example Sources¶
The example project files are located in GitHub: https://github.com/makerdiary/nrf52840-mdk/tree/master/examples/nrf5-sdk/blinky